
Kaip nuspėti nenuspėjamą: ar savavaldžiai automobiliai pasiruošę realaus pasaulio sudėtingumui?
Lenktynės, kurių tikslas – radikaliai pakeisti mūsų miestus ir gyventi naudojantis aukštosiomis technologijomis, įsitvirtinusius automobilių gamintojus skatina siekti autonominių transporto priemonių revoliuciją. Netrukus galėsime gyventi miestuose, kur dirbame važiuodami į darbą, o ne tiesiog važinėjame į darbą. Miestuose, kuriuose važinės savavaldžiai automobiliai, sutaupantys daug laiko ir energijos. Miestuose su atviromis erdvėmis, o ne automobilių stovėjimo vietomis. Ir turbūt svarbiausia, pasaulyje, kuriame kelių eismo įvykiai, dažnai įvykstantys dėl žmonių klaidų, sumažėja net 90%.[1]
Bet ar mes tikrai esame pasiruošę perduoti vairą ir patikėti savo mašinomis? Kaip vairuotojai žino, eismas yra labai sudėtinga sistema, galinti akimirksniu pasikeisti. Tad kaip galime būti tikri, kad autonominė transporto priemonė yra pasirengusi savarankiškai priimti sprendimus ir prisitaikyti?
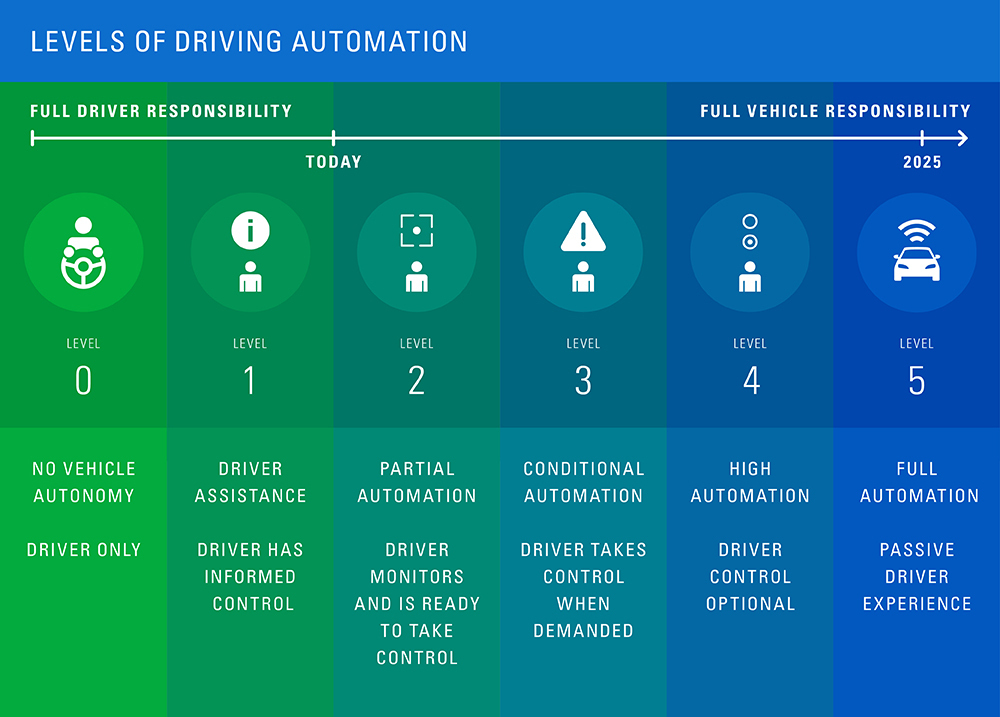
Pasitikėjimas negali atsirasti per naktį, į jį veda laipsniškas procesas, kuris priklausys nuo technologijų plėtros, struktūros ir kiekvieno vairuotojo mąstymo. Vienas dalykas yra sutikti su pilotavimo funkcijomis, tokiomis kaip automatinė pastovaus greičio palaikymo sistema, autonominis avarinis stabdymas ir eismo juostos laikymasis. Tačiau visai kitas dalykas yra visiškas autonominis automobilio valdymas. TÜV SÜD rengtoje apklausoje 30% respondentų teigė, kad autonominį vairavimą laiko „saugiu“ arba „labai saugiu“, o beveik 30% respondentų neapsisprendė. Likę respondentai autonominius automobilius laikė „šiek tiek nesaugiais“ (18 proc.) ar net „nesaugiais“ (24 proc.).
Autonominėms transporto priemonėms išėjus iš bandymų laboratorijų ir išriedėjus į kelius, jų sugebėjimas sulaukti visuomenės palaikymo priklausys nuo pačių vairuotojų pasitikėjimo. Ypač svarbu tai, kad teisinė atsakomybė kartu su technologine tikrove nuo vairuotojų pereis kūrėjams ir gamintojams.
[1] 1 McKinsey, Article: Ten ways autonomous driving could redefine the automotive world – June 2015
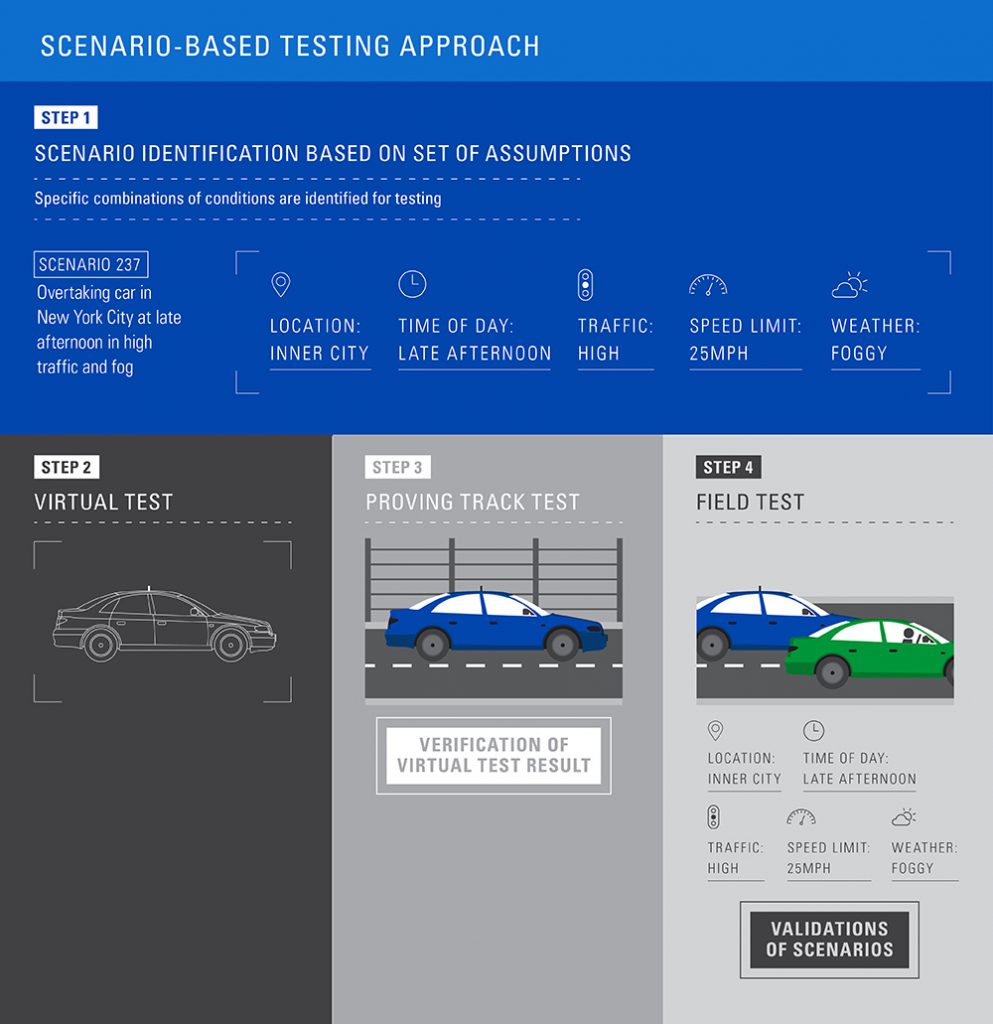
Kadangi realaus gyvenimo eismo scenarijų yra beveik begalė, kiekviena autonominė transporto priemonė susiduria su labai sudėtinga realybe. Kaip mes galime patvirtinti jų sugebėjimą savarankiškai priimti sprendimus? Aktyviai formuodami rytojaus mobilumą, TÜV SÜD kuria integruotą, scenarijais pagrįstą vertinimo metodą. Tikslas išbandyti kiekvieną įsivaizduojamą situaciją pereinant nuo A iki B būtų beprasmis. Realistiškesnis būdas būtų nustatyti ir įvertinti bandymų atvejus, apimančius esminius scenarijus. Šiuo tikslu TÜV SÜD ekspertai kuria išsamių scenarijų, aplinkos, sistemos konfigūracijos ir vairuotojo charakteristikų analizės metodiką. Nustačius reikšmingą ir pakankamai išsamų bandymų rinkinį, šiems savarankiškai vairuojantiems automobiliams įvertinti naudojami skirtingi testų lygiai: virtualūs, žemės ir lauko bandymai.

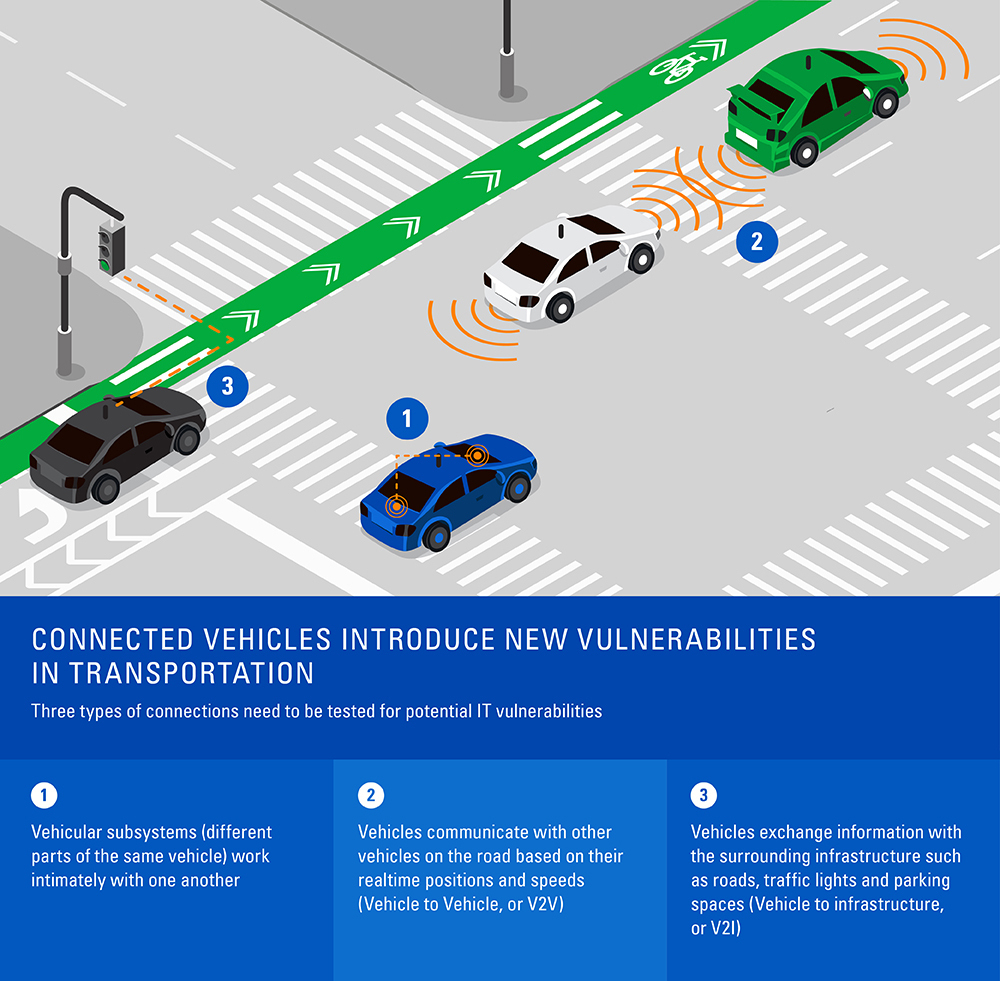
Tobulėjant savarankiškam mobilumui, mūsų automobiliai vis labiau jungsis vienas su kitu ir si juos supančia infrastruktūra. Trapusavyje bendraujančios išmaniosios mobilaus transporto sistemos pagerins eismo srautus ir keleivių saugą. Tačiau drauge neišvengiamai padidins IT saugumo grėsmes: – pirmoji grėsmė yra susisjusi su automobilių sistemomis (skirtingomis to paties automobilio dalimis), kurios turi sklandžiai dirbti vienos su kitomis;- antroji grėsmė apima transporto priemonės komunikaciją su kitomis transporto priemonėmis kelyje, įvertinant jų poziciją bei greitį realiuoju laiku (V2V);- trečioji grėsmė – tai transporto priemonės keitimasis informacija su ją supančia infrastruktūra, tokia kaip keliai, šviesoforai bei parkavimo vietos (V2I).
Kaip ir kalbant apie bet kurias naujas technologijas, norint įsitikinti, ar visiškai savarankiškai vairuojantis automobilis tikrai išnaudoja savo fenomenalų potencialą, būtina atlikti prevencinį rizikos vertinimą.
Šaltinis: Tuvsud.com




{kind=link}
{kind=link}